Coordinador del Semillero: Victor Adolfo Romero Cano
Departamento: Automática y Electrónica
Facultad: Ingeniería
Teléfono: (+57 2) 318 8000 ext. 11847
correo: [email protected]
Presentación

Descripción del Semillero:
Somos un grupo de estudiantes y profesores que desarrollan tecnologías de percepción, navegación y actuación robóticas usando software y hardware libre como solución a problemáticas de la sociedad Colombiana.
Nuestras líneas de énfasis son pero no están limitadas a: agricultura de precisión, conducción autónoma, vehículos aéreos no tripulados y exploración subacuática.
Objetivo:
Desarrollar plataformas robóticas tanto terrestres como aéreas y acuáticas con capacidades avanzadas de percepción, desplazamiento, manipulación y cooperación
Integrantes del semillero

- Alejandro Naranjo Zapata
- Keiry Mariana Pereira Triana
- Alejandro Castaño Vargas
- Andres Felipe Cerquera
- Santiago Restrepo García
- Jhonathan Stiven Castañeda Cano
- Juan Sebastián Orozco Van
- Diego Alejandro Escobar Montoya
- Sebastian Rangel Arango
- Raul Ernesto Diaz Cuchala
- Jeick Hincapie Barrera
- Luis Felipe Tobar Sotelo
- Fernando Marin Velasco
- Sebastián Hurtado Salamanca
- Juan Pablo Martínez Guzmán
- Ivan Mauricio Melo
- José Roberto Londoño
Participaciones en encuentros de Semilleros
- Todas las versiones de RedCOLSI desde 2018
Productos académicos
Ponencias
•Congreso internacional
Design of sliding mode control for an autonomous underwater vehicle
IX Congreso Internacional de Ingeniería Mecatrónica y Automatización
2020
•Congreso internacional
Exploiting the potential of deep reinforcement learning for classification tasks in high-dimensional and unstructured data
LatinX in AI Research at NeurIPS 2019
2019
•Congreso internacional
Probabilistic Perception System for Object Classification Based on Camera-LiDAR Sensor Fusion
LatinX in AI Research at ICML 2019
2019
•Congreso internacional
Open source six degree of freedom manipulator robot
Latin American Congress on Automation and Robotics
2019
•Congreso internacional
Lane detection and trajectory generation system
Latin American Congress on Automation and Robotics
2019
•Congreso nacional
A photogrammetric system for dendrometric feature estimation of individual trees
IEEE 2nd Colombian Conference on Robotics and Automation (CCRA)
2018
•Congreso nacional
Low-cost recognition and classification system based on LIDAR sensors
IEEE 2nd Colombian Conference on Robotics and Automation (CCRA)
2018
•Congreso nacional
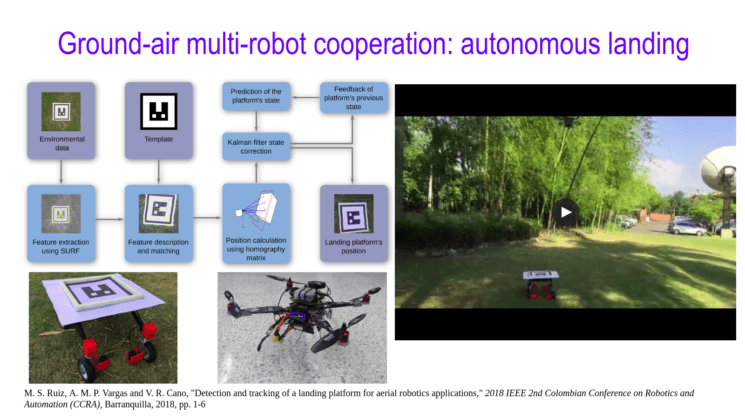
Detection and tracking of a landing platform for aerial robotics applications
IEEE 2nd Colombian Conference on Robotics and Automation (CCRA)
2018


